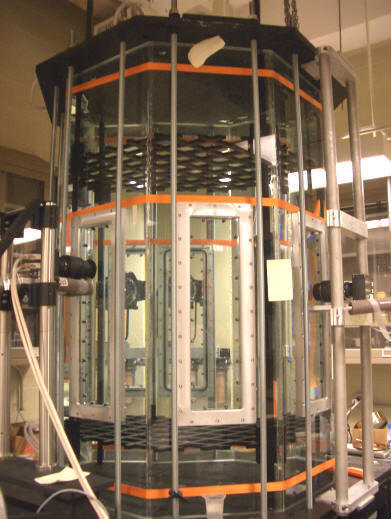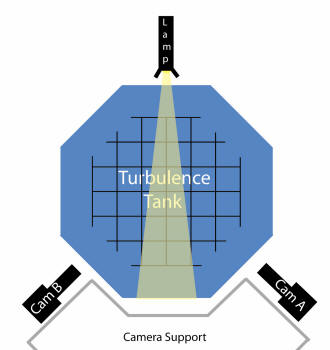
A big part of our lab is a big tank (see the two pictures below).
We create turbulence by oscillating two metal grids in an octagonal tank of water. This stirs neutrally buoyant particles which very closely follow the flow of the water. We then illuminate the particles with a 750 Watt theater lamp (soon to be replaced with a powerful laser). We record high speed video using two high speed (usually 480 frames per second, but up to 16,000 frames per second) digital cameras. Just as two eyes are used to observe the trajectory of a ball flying through the air, we recreate 3-dimensional trajectories of the particles swirling in the water. And we infer the velocity field of the turbulent flow. (see video)
One thing that makes our experiment unique is the way in which we record the video coming out of the cameras to the computers. Usually the images captured by the cameras are recorded onto a computer’s RAM. This has some definite drawbacks. It is much more expensive than hard drive storage, and even if funding is bountiful, only a relatively small amount of RAM can be installed on an average computer. This limits the amount of data that can be stored before all the RAM is used. For example:
To make way for another 8 second data recording all the information would then need to be copied over to the hard drive. Writing to the hard drive is a much slower process then writing to RAM, and would usually take about 7 minutes to transfer.
The second drawback to this method of writing directly to RAM is that the sheer amount of data is very large. For just 8 seconds worth of recording 4GB of hard drive space is used. Although it is true that hard drive space is cheap and easy to come by, just 30 minutes worth of data collection would quickly fill up even a very large hard drive (it would equate to about 1,300 GB worth of data.)
Our lab has successfully designed and implemented a way around these drawbacks.
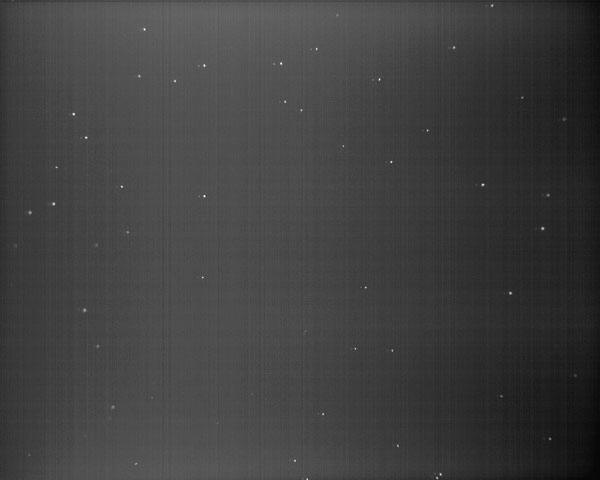
Notice the bright particles on a dark background. In order to recreate the 3 dimensional trajectories (which is our goal) all we need is the positions of the particles in each frame, we don’t need to know anything at all about the black space. We can safely assume that all the black space is black, we don’t need to keep re-recording it every single frame; all we are interested in is the particle positions in each frame. In fact, recording the black space may become troublesome, if there is noise our particle recognition program might confuse the noise for a particle. We don’t want the black background. So, we took it away.
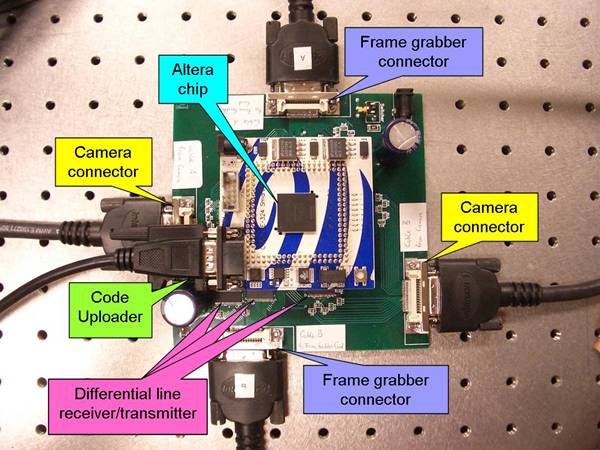
We implemented a real time threshold circuit that compares every pixel to
a certain minimum value (a.k.a. threshold) and allows only the pixels that are
above the threshold to pass and be recorded onto the computer. The information
passed onto the computer is the bright pixel location and how bright it is. This
separates the bright particles from the black background.
The hardware we
designed to do this looks like this:
One final example of how helpful this is:
Before, video ram limited data collection time to ~8 seconds. Now with
direct hard drive recording data collection time ~7 days or longer.
This really opens the doors for measurements of a large range of time scales,
and a large range of length scales. Check back for future experiments.
For further information please contact
Dan Blum - dbblum@wesleyan.edu
return to lab homepage